

=> https://remjln.fr/clavier/
=> https://acquier.developpez.com/cours/USB/
Catégorie : Electronique
Broches de l’Arduino Mega 2560
Voir la documentation officielle (PDF).
Comparatif ATmega 2560 / ATmega 1284P
Mémoire flash : 256 ko / 128 ko
Mémoire SRAM : 8 ko / 16 ko
Mémoire EEPROM : 4 ko / 4 ko
Faire un circuit imprimé avec Kicad 6
Voir les vidéos d’Eric Peronnin (enseignant à l’IUT de Nantes).
Son site Web : https://geii.fr
Téléphone Socotel S63
Logisim
Logisim est un simulateur de circuits logiques.
Pour l’installer sous Debian 11 :
sudo apt-get install logisim
Si on préfère une version plus récente, il existe logisim-evolution :
sudo apt-get update sudo apt-get install snapd sudo snap install core sudo snap install logisim-evolution
Pour exécuter depuis la console :
snap run logisim-evolution
Pour mettre à jour :
sudo snap refresh logisim-evolution
Pour intégrer le logiciel Logisim-evolution au menu de Mate :
Dans la console :
Si le répertoire Logisim-evolution n’existe pas déjà, je le crée :
sudo mkdir /usr/share/logisim-evolution
Je télécharge l’icône Logisim-evolution et l’installe à l’endroit voulu :
cd Téléchargements
wget http://entropie.org/3615/download/logisim-evolution.png
sudo mv logisim-evolution.png /usr/share/logisim-evolution
Pour intégrer le programme au menu de Mate, je crée un fichier logisim-evolution.desktop dans le répertoire /usr/share/applications :
cd /usr/share/applications
sudo nano logisim-evolution.desktop
[Desktop Entry]
Name=Logisim-evolution
Comment=Graphical tool for designing and simulating logic circuits
Exec=snap run logisim-evolution
Icon=/usr/share/logisim-evolution/logisim-evolution.png
Terminal=false
Type=Application
Categories=Education;Electronics;
=> Tutoriels vidéos (INSA Rennes)
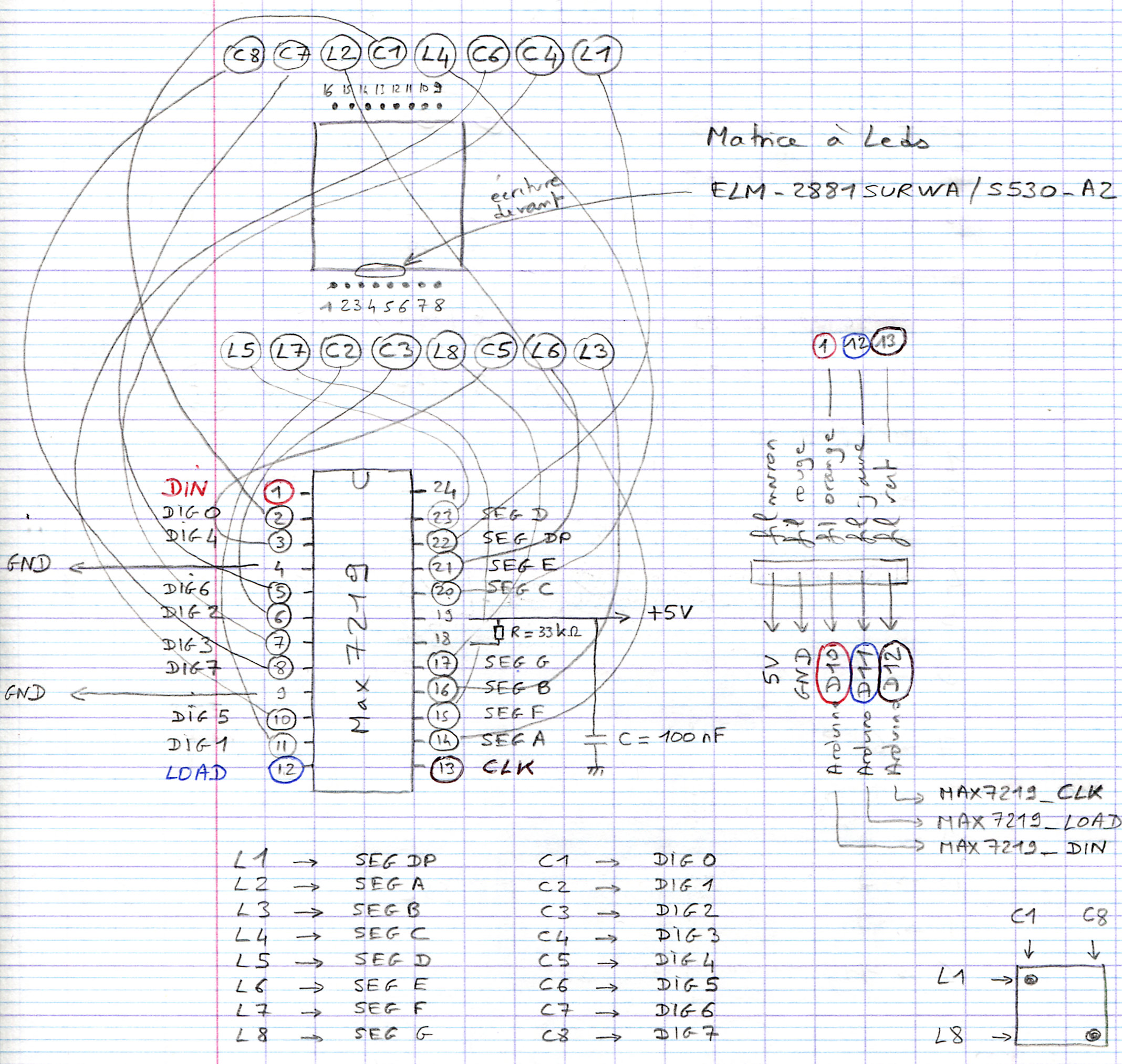
Tutoriel pour un poème (35 pixels)
En attendant plus de détails, voici les éléments clés :
Arduino Nano / MAX7219 / ELM-2881SURWA/S530-A2
Code source (Arduino)
Mettre à jour un programmateur USBasp avec un autre programmateur USBasp (sous Debian 10)
Lorsque je téléverse un programme dans ma carte Arduino Nano avec mon programmateur USBasp, j’obtiens le message suivant : avrdude: warning: cannot set sck period. please check for usbasp firmware update.
Si avrdude n’est pas installé dans Debian 10, le faire préalablement :
sudo apt-get install avrdude
Télécharger la dernière version du firmware (usbasp.2011-05-28.tar.gz ) sur le site officiel et décompresser l’archive :
cd Téléchargements wget https://www.fischl.de/usbasp/usbasp.2011-05-28.tar.gz tar -zxvf usbasp.2011-05-28.tar.gz
La puce sur le programmateur à mettre à jour est un ATmega8L (à vérifier à la loupe). Dans l’archive décompressée ci-dessus, le fichier qui nous intéresse est donc : usbasp.atmega8.2011-05-28.hex
Sur le programmateur à mettre à jour, JP1 est à positionner sur 5V ; les 2 broches de JP2 sont à relier entre elles.
Connecter les 2 programmateurs.
Taper dans la console les 2 lignes suivantes :
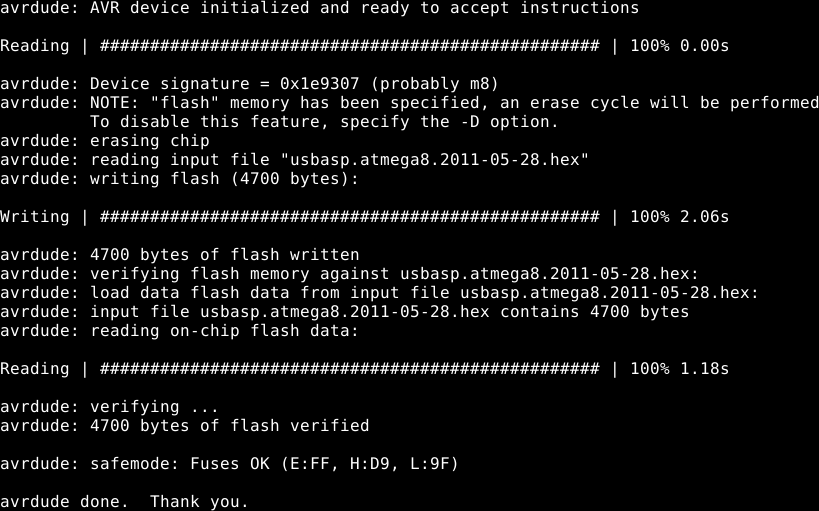
cd Téléchargements/usbasp.2011-05-28/bin/firmware/ avrdude -p atmega8 -c usbasp -U flash:w:usbasp.atmega8.2011-05-28.hex:i -F -P usb
Copie écran de ce qu’on obtient :
Libérer les broches de JP2.
=> Lien
Circuit imprimé pour afficheur LCD alphanumérique
Installation de Fritzing 0.9.6 sous Debian 10
Fritzing 0.9.6 ne fonctionne pas sous Debian 10 :
Fritzing utilise les bibliothèques Qt5 suivantes : libqt5printsupport5 libqt5xml5 libqt5sql5 libqt5serialport5 libqt5sql5-sqlite. Debian 10 en propose la version 5.11 alors que c’est la version 5.12 qui est nécessaire.
Debian 11 qui devrait sortir prochainement proposera la version 5.15. Patience donc…
Dans la console :
Pour supprimer la version 0.9.3 éventuellement installée depuis les dépôts de Debian 10 :
sudo apt-get --purge remove fritzing sudo apt-get autoremove
Si le répertoire fritzing n’existe pas déjà, je le crée :
sudo mkdir /usr/share/fritzing
Télécharger Fritzing depuis : https://fritzing.org/download/ (8 €)
Je décompresse l’archive téléchargée et l’installe à l’endroit voulu :
cd Téléchargements tar jxvf fritzing-0.9.6.linux.AMD64.tar.bz2 sudo mv fritzing-0.9.6.linux.AMD64 /usr/share/fritzing/fritzing-0.9.6
Je télécharge l’icône fritzing et l’installe à l’endroit voulu :
wget http://entropie.org/3615/download/fritzing.png sudo mv fritzing.png /usr/share/fritzing
Pour intégrer le programme au menu de Xfce, je crée un fichier fritzing-0.9.6.desktop dans le répertoire /usr/share/applications :
cd /usr/share/applications sudo nano fritzing-0.9.6.desktop
[Desktop Entry]
Version=0.9.6
Name=Fritzing
GenericName=Fritzing
Comment=Electronic Design Automation software
Exec=/usr/share/fritzing/fritzing-0.9.6/Fritzing
Icon=/usr/share/fritzing/fritzing.png
Terminal=false
Type=Application
Categories=Development;IDE;Electronics;
X-SuSE-translate=false
StartupNotify=true
MimeType=application/x-fritzing-fz;application/x-fritzing-fzz;application/x-fritzing-fzp;application/x-fritzing-fzpz;application/x-fritzing-fzb;application/x-fritzing-fzbz;application/x-fritzing-fzm;
Minitel 1B (Alcatel Telic) : Documents techniques
Le microcontrôleur 8051/8052 (de A. Oumnad, en français).
Je retiens qu’il y a la possibilité de shunter la ROM interne du 8052 et de rechercher des instructions dans une EEPROM externe (broche 31 : EA External Access). D’ailleurs sur la carte-mère du Minitel, il y a 32 broches prévues pour une extension (CO06).
Atmel 8051 Microcontrollers Hardware Manual
8051 Microcontroller Instruction Set
Le processeur graphique (EF9345) est le même que celui du Matra Alice 32k, Matra Alice 90, Philips VG5000.
Processeur semi-graphique EF9345 (datasheet)
Remarque : Sous Debian 10, on trouve dans les dépots MCU 8051 IDE qui est un environnement de développement intégré pour les microcontrôleurs basés sur le 8051. Pour l’installer : sudo apt-get install mcu8051ide.
Cours / Tutoriels :
Cours-TP 8051 (de Christian Dupaty)