Site : https://vod.mediatheque-numerique.com
Version du lecteur VOD : 3.0.6
Dans la console :
Si le répertoire Mednum Offline Player n’existe pas déjà, je le crée :
sudo mkdir /usr/share/mednum-offline-player
Je télécharge l’application : mednum-offline-player.AppImage
J’installe l’application à l’endroit voulu :
cd Téléchargements
sudo mv mednum-offline-player.AppImage /usr/share/mednum-offline-player
Je rends le fichier exécutable :
sudo chmod +x /usr/share/mednum-offline-player/mednum-offline-player.AppImage
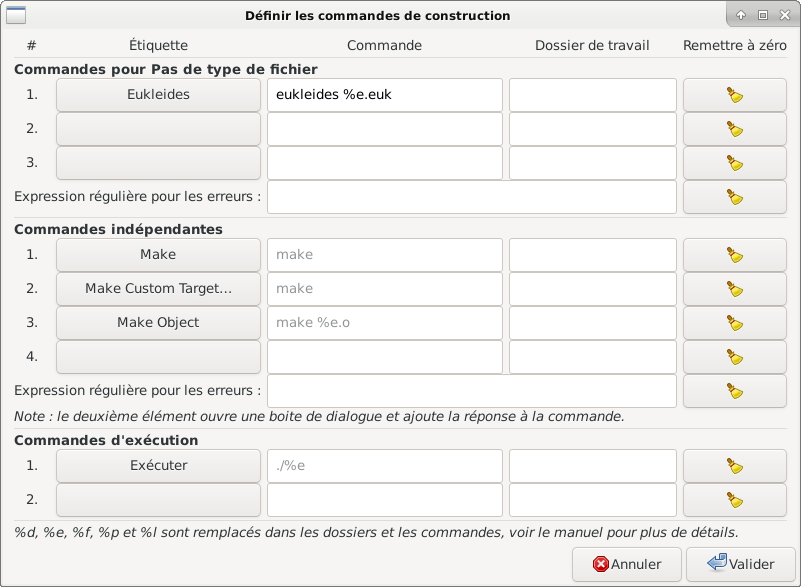
Pour intégrer le programme au menu de Xfce (juste après avoir cliqué sur mednum-offline-player.AppImage) :
Le fichier .desktop se trouve dans : ./local/share/applications
Son contenu est ci-dessous :
[Desktop Entry] Name=MEDNUM Offline Player Comment=ARTE VOD offline player Exec="/usr/share/mednum-offline-player/mednum-offline-player.AppImage" %U Terminal=false Type=Application Icon=appimagekit-mednum offline player X-AppImage-Version=3.0.6 X-AppImage-BuildId=71f28e60-134a-11a9-2954-499dceea7f3c Categories=Video; X-Desktop-File-Install-Version=0.26 X-AppImage-Comment=Generated by /tmp/.mount_mednum16hnCt/AppRun TryExec=/usr/share/mednum-offline-player/mednum-offline-player.AppImage
Modification à apporter ci-dessus : Categories=AudioVideo;
Pour effacer une version précédente de Mednum Offline Player (à adapter) :
sudo rm -rf /usr/share/mednum-offline-player/mednum-offline-player.AppImage