\documentclass[border=10pt]{standalone}
\usepackage{circuitikz}
\ctikzset{resistor=european}
\begin{document}
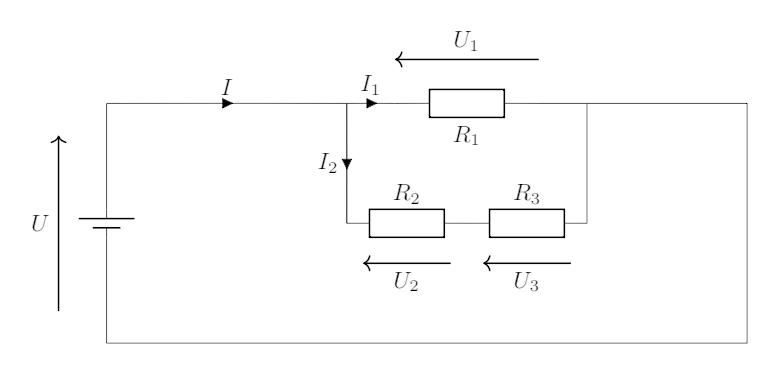
\begin{circuitikz}[scale=1.2]
% === une grille pour s'aider ===
% \draw [help lines] (-2,-1) grid (9,5);
% === Source à gauche (bornes inversées) ===
\draw (0,3) to[battery1] (0,0);
% === Flèche tension U à gauche du générateur, pointant vers le haut ===
\draw[->, thick] (-0.6,0.4) -- (-0.6,2.6) node[midway, left] {$U$};
% === Fil bas de la source ===
\draw (0,0) -- (6,0);
% === Fil supérieur gauche avec courant I ===
\draw (0,3) to[short, i=$I$] (3,3);
% === Courant I1 sur le fil avant R1, puis R1 centré sur la branche ===
\draw (3,3) to[short, i=$I_1$] (3.6,3);
\draw (3.6,3) to[R, l_=$R_1$] (5.4,3);
\draw (5.4,3) -- (6,3);
\draw[->, thick] (5.4,3.55) -- (3.6,3.55) node[midway, above] {$U_1$};
% === Fils verticaux gauche et droit du bloc parallèle ===
\draw (3,3) -- (3,1.5);
\draw (6,3) -- (6,1.5);
% === Courant I2 sur le fil vertical gauche descendant vers R2 ===
\draw (3,3) to[short, i_=$I_2$] (3,1.5);
% === Branche basse : R2 + R3 en série ===
\draw (3,1.5) to[R, l=$R_2$] (4.5,1.5)
to[R, l=$R_3$] (6,1.5);
\draw[->, thick] (4.3,1.0) -- (3.2,1.0) node[midway, below] {$U_2$};
\draw[->, thick] (5.8,1.0) -- (4.7,1.0) node[midway, below] {$U_3$};
% === Fermeture droite du circuit ===
\draw (6,3) -- (8,3) -- (8,0) -- (6,0);
\end{circuitikz}
\end{document}
Texmaker génère un pdf, mais on peut aussi utiliser en ligne de commande :
pdflatex circuit.tex
Pour obtenir une image svg à intégrer dans LibreOffice :
sudo apt-get install pdf2svg pdf2svg circuit.pdf circuit.svg
Un fichier bash circuit.sh pour automatiser tout ça :
#!/bin/bash
# Vérification de l'argument
if [ $# -ne 1 ]; then
echo "Usage : $0 fichier.tex"
exit 1
fi
FICHIER="$1"
# Vérification que le fichier existe
if [ ! -f "$FICHIER" ]; then
echo "Erreur : fichier '$FICHIER' introuvable."
exit 1
fi
# Nom sans extension
NOM="${FICHIER%.tex}"
# Compilation LaTeX
echo "Compilation LaTeX..."
pdflatex -interaction=nonstopmode "$FICHIER"
if [ $? -ne 0 ]; then
echo "Erreur lors de la compilation LaTeX."
exit 1
fi
# Conversion en SVG
echo "Conversion en SVG..."
pdf2svg "${NOM}.pdf" "${NOM}.svg"
if [ $? -ne 0 ]; then
echo "Erreur lors de la conversion en SVG."
exit 1
fi
# Nettoyage des fichiers temporaires
rm -f "${NOM}.aux" "${NOM}.log"
echo "Terminé : ${NOM}.pdf et ${NOM}.svg générés."
Utilisation :
chmod +x circuit.sh ./circuit.sh circuit.tex