Auteur/autrice : ES
Low-Tech
 Socialter sort ce mois-ci un hors-série spécial low-tech. Celui-ci est disponible en kiosque.
Socialter sort ce mois-ci un hors-série spécial low-tech. Celui-ci est disponible en kiosque.
Liens proposés en fin de magazine :
Barnabé Chaillot
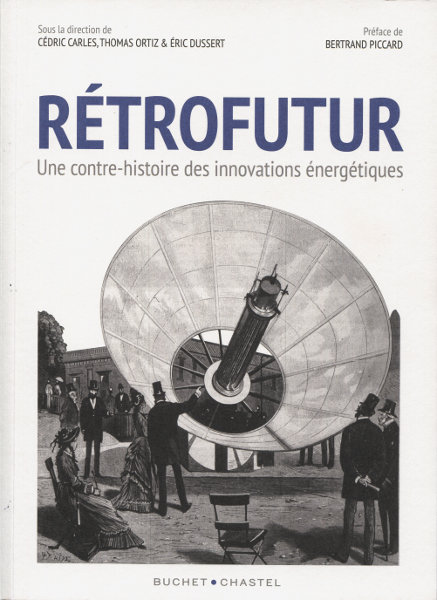
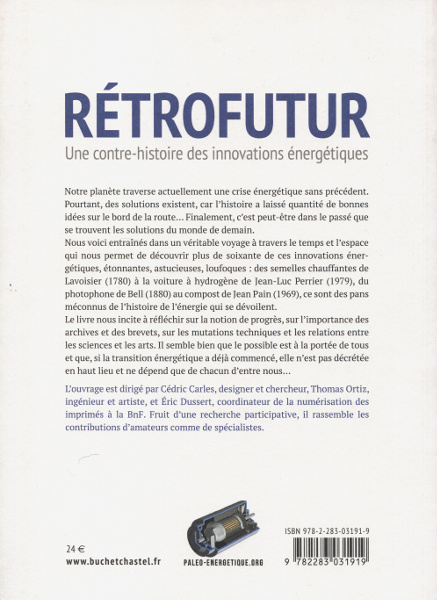
Paléo-énergétique
Low-tech Lab
Archéologie des média
Minitel avec clavier ABCDEF



Définir la date du Raspberry Pi et l’enregistrer dans le DS3231
Pour installer le DS3231, voir cet article.
Pour une simple mise à l’heure :
sudo date -s "May 15 2019 22:03"
sudo hwclock -w (pour écrire dans le DS3231)
sudo hwclock (pour lire dans le DS3231)
Mise à jour de « la valise »
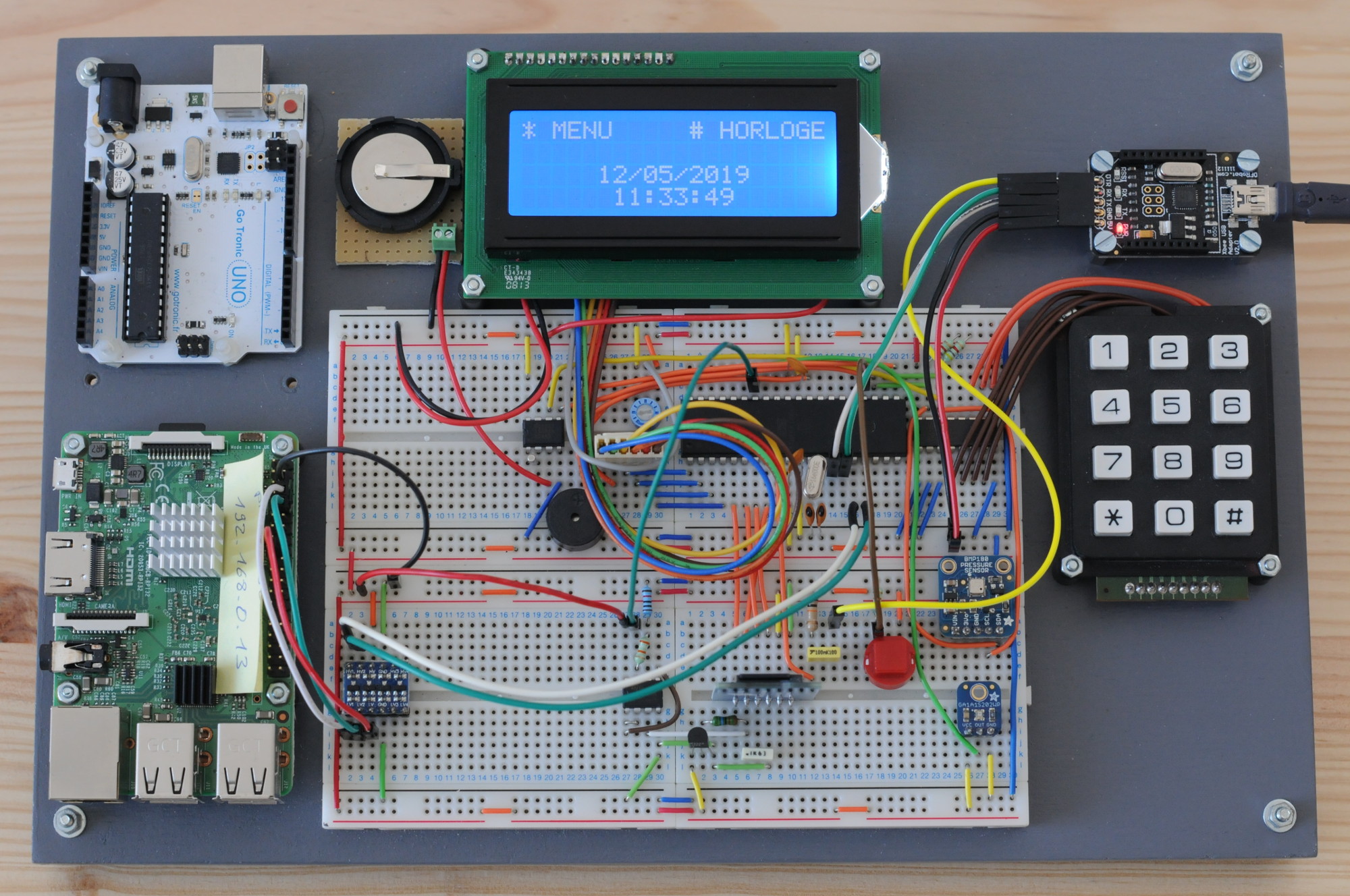
J’ai rajouté un capteur de température LM35CZ.
Code source sur Github.
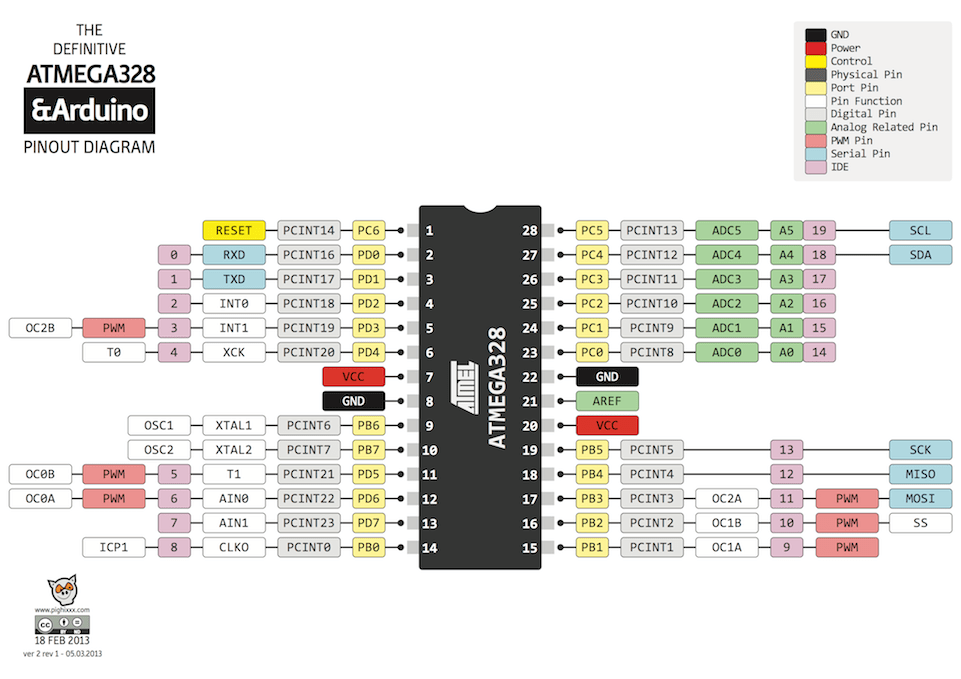
Broches de l’Arduino Uno

Broches de l’ATmega 328P
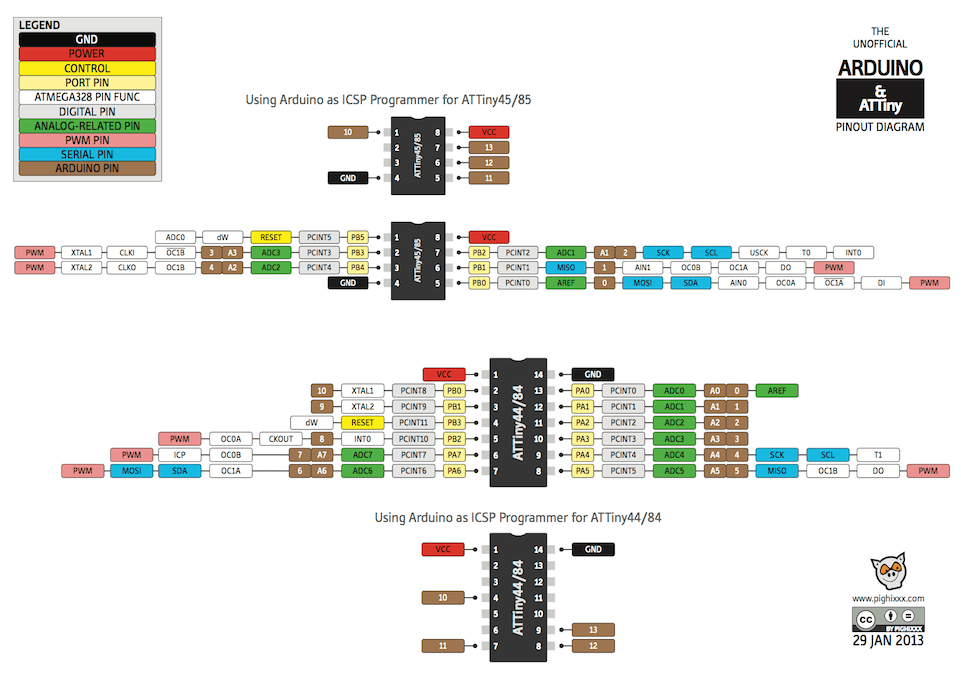
Broches de l’ATtiny 45/85 et 44/84
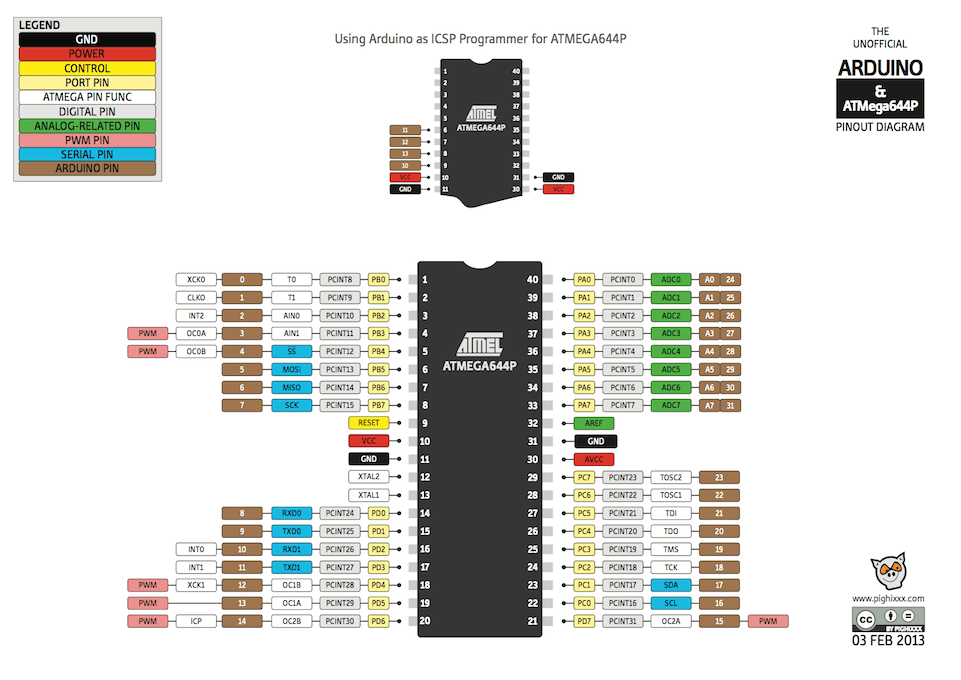
Broches de l’ATmega 644P