Lorsque je téléverse un programme dans ma carte Arduino Nano avec mon programmateur USBasp, j’obtiens le message suivant : avrdude: warning: cannot set sck period. please check for usbasp firmware update.
Si avrdude n’est pas installé dans Debian 10, le faire préalablement :
sudo apt-get install avrdude
Télécharger la dernière version du firmware (usbasp.2011-05-28.tar.gz ) sur le site officiel et décompresser l’archive :
cd Téléchargements wget https://www.fischl.de/usbasp/usbasp.2011-05-28.tar.gz tar -zxvf usbasp.2011-05-28.tar.gz
La puce sur le programmateur à mettre à jour est un ATmega8L (à vérifier à la loupe). Dans l’archive décompressée ci-dessus, le fichier qui nous intéresse est donc : usbasp.atmega8.2011-05-28.hex
Sur le programmateur à mettre à jour, JP1 est à positionner sur 5V ; les 2 broches de JP2 sont à relier entre elles.
Connecter les 2 programmateurs.
Taper dans la console les 2 lignes suivantes :
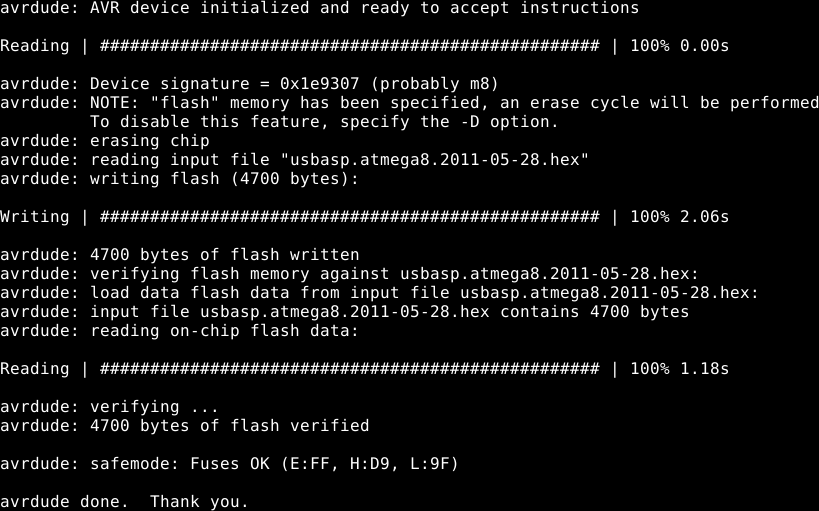
cd Téléchargements/usbasp.2011-05-28/bin/firmware/ avrdude -p atmega8 -c usbasp -U flash:w:usbasp.atmega8.2011-05-28.hex:i -F -P usb
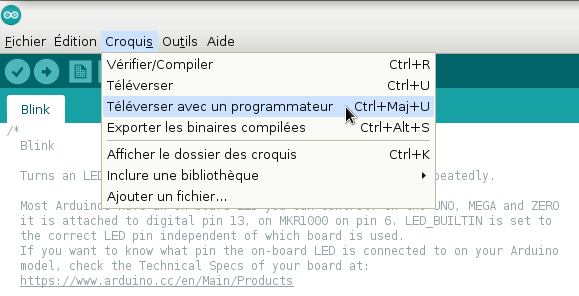
Copie écran de ce qu’on obtient :
Libérer les broches de JP2.
=> Lien



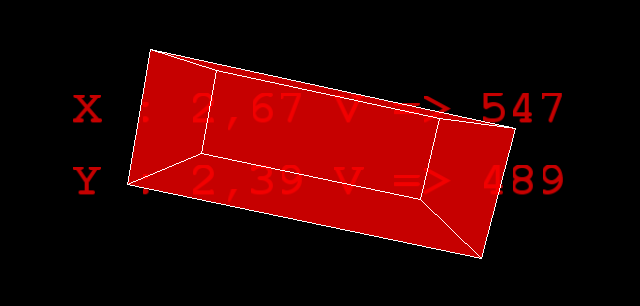
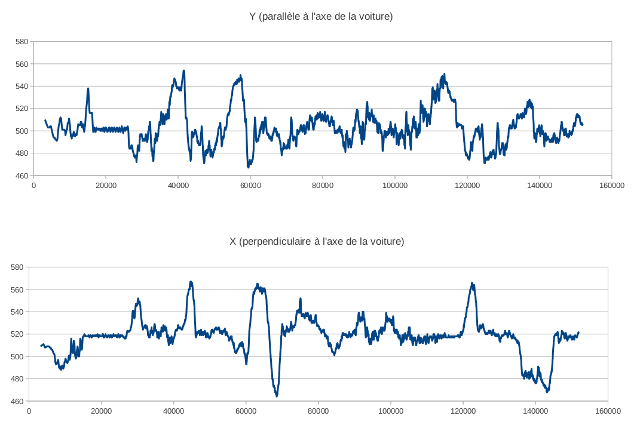
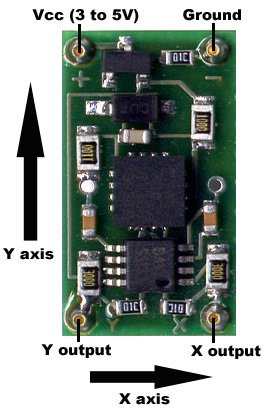 La patte Vcc est à connecter à la borne 5V de la carte Arduino (au niveau de POWER). La patte Ground est à connecter à la borne Gnd de la carte Arduino (au niveau de POWER). La patte X output est à connecter à la borne analogique 1 par exemple (au niveau de ANALOG IN). La patte Y output est à connecter à la borne analogique 2 par exemple (au niveau de ANALOG IN).
La patte Vcc est à connecter à la borne 5V de la carte Arduino (au niveau de POWER). La patte Ground est à connecter à la borne Gnd de la carte Arduino (au niveau de POWER). La patte X output est à connecter à la borne analogique 1 par exemple (au niveau de ANALOG IN). La patte Y output est à connecter à la borne analogique 2 par exemple (au niveau de ANALOG IN).